復旦邱錫鵬團隊提出「上下文世界建模」:無需微調,VLA即可適應新環境
重點摘要
復旦大學邱錫鵬團隊提出「上下文世界建模」方法,讓視覺-語言-動作(VLA)模型無需微調即可適應新環境。該研究直接針對VLA模型難以泛化的核心問題,提供無需額外訓練的適應方案。
### 重點整理:從「難泛化」到「即學即用」的突破
視覺-語言-動作(VLA)模型一直是機器人與AI領域的熱點,但其最大痛點在於「泛化」:當機器人從訓練環境轉移到新場景時,往往需要重新微調或收集大量數據,才能適應陌生的物體位置、光線變化或任務指令。復旦大學邱錫鵬團隊提出的「上下文世界建模」(Contextual World Modeling)方法,試圖從根本解決這個問題——讓VLA模型無需微調,就能透過「閱讀」環境的上下文資訊,直接在新環境中執行任務。這項研究若屬實,將大幅降低VLA模型的部署成本與時間,尤其對服務型機器人、自動化產線等需要快速適應變動環境的應用場景,意義深遠。
### 背景脈絡:VLA的「泛化困境」為何難以突破?
目前主流VLA模型多採用「預訓練+微調」架構:先在大型數據集上學習語言與視覺的共通表徵,再針對特定環境或任務進行參數調整。這種模式有兩個明顯限制:一是微調過程需要人工標註或模擬數據,耗時且昂貴;二是模型容易「記住」訓練環境的統計偏誤,一旦遇到未見過的物體擺設、光照條件或動作序列,表現就會急速下滑。邱錫鵬團隊過去曾提出多項關於語言模型與多模態學習的前瞻性研究,本次的「上下文世界建模」可視為延續他們在「上下文學習」(In-Context Learning)領域的積累,將大型語言模型的「不更新權重也能適應新任務」特性,遷移到VLA模型上。
### 核心機制:如何讓模型「讀懂」新環境的規則?
根據標題與既有研究脈絡推測,「上下文世界建模」可能讓VLA模型在推理階段,直接將環境中的當下場景(如攝像頭影像)、語言指令(如「把杯子放到左邊的托盤」)以及少量歷史操作示範(如幾幀動作序列)拼接成「上下文提示」。模型不再依賴固定的靜態參數去匹配環境,而是動態地從這些提示中推導出當前世界的「運作規則」——例如物體之間的空間關係、可移動性的限制、任務的語法結構等。這樣一來,無論環境如何改變,只要提供足夠的上下文樣本,模型就能即時調整行為,無須回頭調整權重。
### 對比傳統方法:從「背誦」轉向「理解」
傳統VLA的泛化能力高度依賴訓練數據的多樣性,而「上下文世界建模」更像是一種「即時歸納」:模型不再試圖記住所有可能的環境組合,而是學會如何從新環境的局部觀察中抽象出通用的因果關係。這類似於人類在陌生廚房做菜時,能透過觀察鍋鏟位置與食材擺放,快速推論出合理的操作順序。若此方法成功,未來VLA模型的訓練重點可能從「收集海量數據」轉向「設計有效的上下文表徵結構」,這對硬體資源有限的團隊而言是重大利多。
### 可能影響一:機器人部署進入「零門檻」時代
無需微調的VLA模型將直接衝擊工業與服務機器人的商業模式。目前自動化產線若更換產品型號,往往需要工程師花費數週重新拍攝數據並微調模型;家庭服務機器人若換到新住家,也常因家具配置不同而失靈。若邱錫鵬團隊的方法可落地,機器人將能在「第一次見到環境」時就根據當下觀測與使用者口語描述,執行拿取、放置、裝配等動作。這不僅降低技術門檻,也可能催生更多「即插即用」的AI機器人產品。
### 可能影響二:對研究社區的「範式轉換」挑戰
目前多數VLA研究仍聚焦於如何設計更好的網路架構或更大的預訓練數據集。「上下文世界建模」若被驗證有效,可能促使學界將注意力轉向「提示工程」(Prompt Engineering)與「動態推理」——例如如何構造環境的上下文才能最大化泛化效果?不同模態(視覺、語言、動作)在上下文中的權重如何分配?這些問題將成為新的研究熱點。同時,該方法也可能與近期流行的「具身智能」(Embodied AI)基礎模型形成互補,甚至改變未來機器人模型的評估標準——從「在特定測試集上的準確率」轉向「在任意環境下的零樣本適應力」。
### 讀者可關注的後續:論文細節、案例與局限性
由於目前只釋出標題與簡短描述,讀者可密切關注以下幾點:第一,團隊是否公布完整的技術論文或程式碼?具體的上下文建模方法(例如是否採用Transformer的注意力機制來動態編碼環境)是判斷創新性的關鍵。第二,有無公開的示範案例?例如在不同模擬平台(如Habitat、Robosuite)或真實機器人上的泛化成功率對比。第三,該方法的局限性——例如對上下文長度的敏感性、對環境變化的容忍度(如極端光照或遮擋)等。此外,由於無需微調可能導致對特定環境的「過度依賴上下文」,如何平衡穩定性與靈活性,也是未來值得追蹤的技術細節。
### 結語:一場AI「即學即用」的實驗正在展開
邱錫鵬團隊的「上下文世界建模」並非憑空出現,而是自然語言處理領域的「上下文學習」在機器人領域的橫向遷移。如果成功,它將提供一條無需大規模重新訓練、讓VLA模型快速適應動態世界的路徑。然而,從學術突破到工程實用仍有鴻溝——模型是否能處理長期任務、是否會因環境噪音而產生幻覺?這些都需要更多的公開證據來檢驗。對台灣的AI與機器人產業而言,這項研究也提示了一個方向:與其盲目追求更大的模型與數據,不如思考如何讓模型「更聰明地觀察當下」。
Related
相關文章
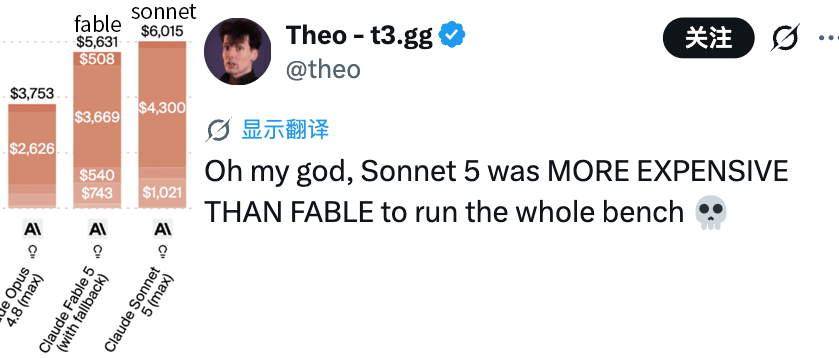
A社你解釋下,啥叫Sonnet 5比Fable 5還貴?
這篇消息聚焦「A社你解釋下,啥叫Sonnet 5比Fable 5還貴?」。原始導語提到:“性價比模型”價格明降暗漲 從 AI 情報角度來看,這類內容值得關注其背後的技術進展、產品落地、產業競爭與後續市場影響。

剛剛,Fable 5解禁!Anthropic連夜發“性價比”新模型,網友:感謝中國開源嚴父
這篇消息聚焦「剛剛,Fable 5解禁!Anthropic連夜發“性價比”新模型,網友:感謝中國開源嚴父」。原始導語提到:Claude Sonnet 5深夜來襲!但全網只等Fable 5? 從 AI 情報角度來看,這類內容值得關注其背後的技術進展、產品落地、產業競爭與後續市場影響。

剛剛,Anthropic發佈Sonnet 5,性能接近Opus 4.8,但不一定更便宜
Anthropic 今日發布 Sonnet 5,官方稱其為「迄今為止最具 Agent 屬性的 Sonnet 模型」。該模型性能接近 Opus 4.8,但價格不一定更低。
大規模封號後,Claude 突然發佈更便宜的新模型
Anthropic 在大規模封號後,突然推出更便宜的 Claude 新模型,旨在擴大用戶基礎。新模型以較低成本提供服務,可能吸引更多開發者與企業採用。此舉顯示 Anthropic 正積極調整策略,以應對市場競爭與用戶反饋。
智力平替 GPT-5?Qwen 3.6 27B 評測顯示本地模型已達前沿水準
Qwen3.6系列顛覆本地大模型需妥協的認知。開發者在MacBook Max M5 128GB上實測Qwen3.6 27B,採用8-bit GGUF量化,效率驚人。結論顯示它不僅是能用,更是無需犧牲體驗、足以滿足通用智能需求的強力工具,標誌著本地運行大模型進入新階段。
Claude Sonnet 5 發佈:AI 主力模型進入“高能低耗”新時代
Anthropic發佈新一代大模型Claude Sonnet5,定位日常高頻工作流主力,主打卓越編碼、工具調用與邏輯規劃能力,性能指標逼近旗艦Opus4,再次刷新AI模型迭代速度。